Surface Mapping Using Fiducial Markers and Screen Corners#
What are Fiducial Markers?#
Fiducial markers (for a review see 1) are specially designed visual patterns that serve as reference points for establishing coordinate correspondence. They are reliably detected in images, enabling transformation between image/video coordinates and real-world coordinates. In eye-tracking, they allow us to transform gaze from the camera’s perspective to the observed surface (for example, a computer screen).
PyNeon supports two widely-adopted marker systems:
AprilTag (references2,3): Also used by Pupil Labs Neon Player and Pupil Cloud.
ArUco (reference4): Integrated into OpenCV, enabling marker detection via cv2.aruco.

Sample Dataset#
We use a sample dataset called “markers” containing two recordings: one with AprilTag markers and one with ArUco markers. In both, a participant viewed artworks on a computer screen. Specifically, the participant moved their head often to test robustness under larger head motion. We will map gaze and fixation data onto the screen using markers visible in the scene video. The sample data is fetched via get_sample_data(...) and stored locally after download.
[1]:
from pyneon import Dataset, get_sample_data
import matplotlib.pyplot as plt
# Load a sample recording
dataset_dir = get_sample_data("markers", format="cloud")
dataset = Dataset(dataset_dir)
Let’s start with the AprilTag recording (recording index 0).
[2]:
rec = dataset.recordings[0]
print(rec)
Data format: cloud (version: 2.5)
Recording ID: 16841adb-da58-4c42-be02-f052c3c43db3
Wearer ID: 028e4c69-f333-4751-af8c-84a09af079f5
Wearer name: Pilot
Recording start time: 2025-09-22 00:25:14.096000
Recording duration: 244820000000 ns (244.82 s)
AprilTag Example#
Visualizing Markers in Video#
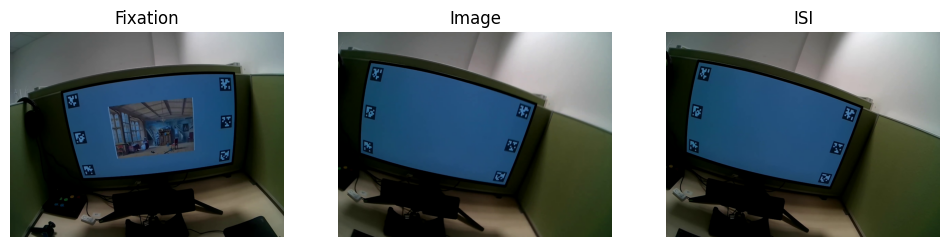
First, inspect a few frames to confirm the markers are clearly visible and well lit. Below are three example frames: fixation cross, artwork presentation, and inter-trial interval.
[3]:
video = rec.scene_video
fig, axs = plt.subplots(1, 3, figsize=(12, 3))
video.plot_frame(380, ax=axs[0], show=False)
video.plot_frame(500, ax=axs[1], show=False)
video.plot_frame(520, ax=axs[2], show=False)
axs[0].set_title("Fixation")
axs[1].set_title("Image")
axs[2].set_title("ISI")
plt.show()
Step 1: Detect Markers#
The detect_markers() method automatically detects AprilTag or ArUco markers. The only required argument is marker_family (for example, '36h11' for AprilTag tag36h11, omitting “tag”).
Optional parameters allow customization:
processing_window: restrict detection to a specific time rangeprocessing_window_unit: interpret the window as frames, seconds, or timestampsstep: process every Nth frame to speed up detectiondetector_parameters: pass customcv2.aruco.DetectorParametersfor fine-tuningundistort: optionally undistort frames before detection
Here we use default settings, processing all frames:
[4]:
from pathlib import Path
from pyneon import Stream
import os
detection_path = Path("export") / "detected_markers.csv"
if detection_path.exists():
detected_markers = Stream(detection_path)
else:
os.makedirs(detection_path.parent, exist_ok=True)
detected_markers = video.detect_markers("36h11", step=5)
detected_markers.save(detection_path)
Verifying Detection#
Detected markers are stored in a PyNeon Stream with timestamps from the video frames. Each row corresponds to a detection and includes the marker id and corner coordinates in the video frame.
[5]:
print(detected_markers.data.head(20))
frame index marker family marker id marker name \
timestamp [ns]
1758493517123422222 65 36h11 0 36h11_0
1758493517123422222 65 36h11 5 36h11_5
1758493517123422222 65 36h11 4 36h11_4
1758493517623233333 80 36h11 0 36h11_0
1758493517623233333 80 36h11 1 36h11_1
1758493517623233333 80 36h11 2 36h11_2
1758493517623233333 80 36h11 5 36h11_5
1758493517623233333 80 36h11 4 36h11_4
1758493517623233333 80 36h11 3 36h11_3
1758493517789844444 85 36h11 0 36h11_0
1758493517789844444 85 36h11 1 36h11_1
1758493517789844444 85 36h11 5 36h11_5
1758493517789844444 85 36h11 2 36h11_2
1758493517789844444 85 36h11 4 36h11_4
1758493517789844444 85 36h11 3 36h11_3
1758493517956444444 90 36h11 0 36h11_0
1758493517956444444 90 36h11 1 36h11_1
1758493517956444444 90 36h11 2 36h11_2
1758493517956444444 90 36h11 5 36h11_5
1758493517956444444 90 36h11 4 36h11_4
top left x [px] top left y [px] top right x [px] \
timestamp [ns]
1758493517123422222 969.0 200.0 1031.0
1758493517123422222 991.0 380.0 1050.0
1758493517123422222 1008.0 546.0 1063.0
1758493517623233333 443.0 539.0 502.0
1758493517623233333 1201.0 482.0 1259.0
1758493517623233333 1204.0 672.0 1261.0
1758493517623233333 467.0 722.0 525.0
1758493517623233333 497.0 888.0 552.0
1758493517623233333 1198.0 846.0 1252.0
1758493517789844444 403.0 535.0 465.0
1758493517789844444 1182.0 458.0 1242.0
1758493517789844444 433.0 723.0 493.0
1758493517789844444 1188.0 653.0 1247.0
1758493517789844444 470.0 893.0 527.0
1758493517789844444 1185.0 830.0 1241.0
1758493517956444444 358.0 531.0 420.0
1758493517956444444 1152.0 448.0 1213.0
1758493517956444444 1159.0 645.0 1219.0
1758493517956444444 392.0 722.0 451.0
1758493517956444444 431.0 895.0 489.0
top right y [px] bottom right x [px] \
timestamp [ns]
1758493517123422222 192.0 1037.0
1758493517123422222 377.0 1055.0
1758493517123422222 547.0 1067.0
1758493517623233333 533.0 509.0
1758493517623233333 480.0 1260.0
1758493517623233333 666.0 1259.0
1758493517623233333 720.0 534.0
1758493517623233333 888.0 563.0
1758493517623233333 837.0 1247.0
1758493517789844444 526.0 473.0
1758493517789844444 455.0 1245.0
1758493517789844444 719.0 504.0
1758493517789844444 646.0 1246.0
1758493517789844444 892.0 539.0
1758493517789844444 820.0 1237.0
1758493517956444444 522.0 431.0
1758493517956444444 445.0 1216.0
1758493517956444444 638.0 1218.0
1758493517956444444 718.0 463.0
1758493517956444444 894.0 503.0
bottom right y [px] bottom left x [px] \
timestamp [ns]
1758493517123422222 257.0 976.0
1758493517123422222 438.0 997.0
1758493517123422222 600.0 1010.0
1758493517623233333 599.0 450.0
1758493517623233333 546.0 1203.0
1758493517623233333 727.0 1202.0
1758493517623233333 780.0 477.0
1758493517623233333 942.0 508.0
1758493517623233333 890.0 1192.0
1758493517789844444 593.0 412.0
1758493517789844444 521.0 1186.0
1758493517789844444 780.0 444.0
1758493517789844444 708.0 1189.0
1758493517789844444 944.0 483.0
1758493517789844444 873.0 1183.0
1758493517956444444 592.0 370.0
1758493517956444444 513.0 1155.0
1758493517956444444 701.0 1160.0
1758493517956444444 781.0 403.0
1758493517956444444 948.0 445.0
bottom left y [px] center x [px] center y [px]
timestamp [ns]
1758493517123422222 262.0 1003.25 227.75
1758493517123422222 438.0 1023.25 408.25
1758493517123422222 598.0 1037.00 572.75
1758493517623233333 604.0 476.00 568.75
1758493517623233333 550.0 1230.75 514.50
1758493517623233333 734.0 1231.50 699.75
1758493517623233333 783.0 500.75 751.25
1758493517623233333 941.0 530.00 914.75
1758493517623233333 898.0 1222.25 867.75
1758493517789844444 600.0 438.25 563.50
1758493517789844444 526.0 1213.75 490.00
1758493517789844444 784.0 468.50 751.50
1758493517789844444 716.0 1217.50 680.75
1758493517789844444 947.0 504.75 919.00
1758493517789844444 884.0 1211.50 851.75
1758493517956444444 597.0 394.75 560.50
1758493517956444444 517.0 1184.00 480.75
1758493517956444444 709.0 1189.00 673.25
1758493517956444444 783.0 427.25 751.00
1758493517956444444 947.0 467.00 921.00
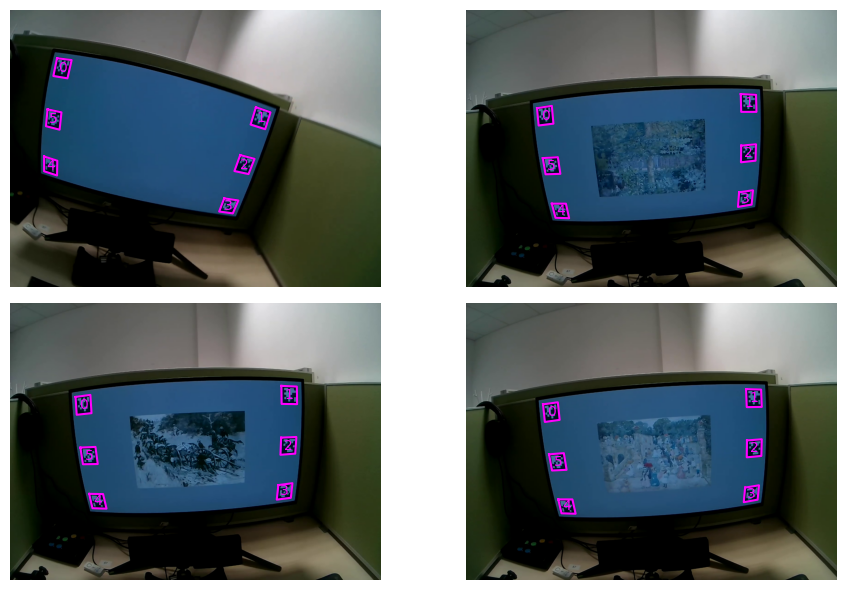
Spot-check detections by plotting markers on selected frames. This makes it easy to confirm that ids are correct and corners line up with the visual markers:
[6]:
# Plot a few frames with detected markers
fig, axs = plt.subplots(2, 2, figsize=(10, 6), tight_layout=True)
axs = axs.flatten()
video.plot_detections(detected_markers, frame_index=500, ax=axs[0], show=False)
video.plot_detections(detected_markers, frame_index=1000, ax=axs[1], show=False)
video.plot_detections(detected_markers, frame_index=1500, ax=axs[2], show=False)
video.plot_detections(detected_markers, frame_index=2000, ax=axs[3], show=False)
plt.show()
Step 2: Define Real-World Marker Coordinates#
To establish the mapping, provide a dataframe with real-world coordinates for each marker. This requires:
Marker name: must match the ids reported by
detect_markers()Center coordinates: where the marker is located in the target surface coordinate system (here, screen pixels)
Size: physical marker size in the same units as the target surface
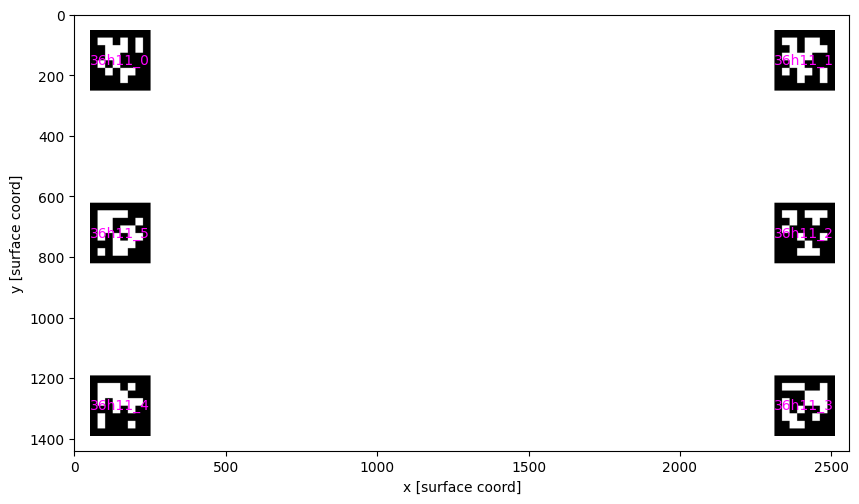
In this experiment (screen resolution 2560x1440), markers were placed near the screen corners with a 50 px margin and 200x200 px size. They are also placed in a clockwise order, starting from the top-left corner.
Once a marker_info dataframe is defined, we can preview it to make sure the coordinates look correct using the plot_marker_layout() function:
[7]:
from pyneon.vis import plot_marker_layout
import pandas as pd
width = 2560
height = 1440
marker_layout = pd.DataFrame(
{
"marker name": [f"36h11_{i}" for i in range(6)],
"size": 200,
"center x": [150, width - 150, width - 150, width - 150, 150, 150],
"center y": [150, 150, height / 2, height - 150, height - 150, height / 2],
}
)
print(marker_layout)
fig, ax = plt.subplots(figsize=(10, 6))
plot_marker_layout(marker_layout, ax=ax, show_marker_names=True, show=False)
ax.set_xlim(0, width)
ax.set_ylim(height, 0)
plt.show()
marker name size center x center y
0 36h11_0 200 150 150.0
1 36h11_1 200 2410 150.0
2 36h11_2 200 2410 720.0
3 36h11_3 200 2410 1290.0
4 36h11_4 200 150 1290.0
5 36h11_5 200 150 720.0
Step 3: Compute Homography Transformation#
The find_homographies() method computes a frame-by-frame 2D transformation (homography) between detected marker locations and their real-world coordinates. The result is a Stream of 3x3 homography matrices, one per frame where enough markers are available. These matrices enable mapping any point from camera coordinates to screen coordinates.
[8]:
from pyneon.video import find_homographies
homographies = find_homographies(
detected_markers,
layout=marker_layout,
)
print(homographies.data.head())
Computing surface-mapping homographies: 100%|██████████| 1408/1408 [00:02<00:00, 650.41it/s]
homography (0,0) homography (0,1) homography (0,2) \
timestamp [ns]
1758493517123422222 5.314940 -0.583451 -4959.439257
1758493517623233333 2.598597 -0.442606 -850.410264
1758493517789844444 2.466307 -0.499194 -665.028851
1758493517956444444 2.398689 -0.518810 -521.535770
1758493518123044444 2.349698 -0.485569 -470.320079
homography (1,0) homography (1,1) homography (1,2) \
timestamp [ns]
1758493517123422222 0.617168 4.761420 -1464.540605
1758493517623233333 0.186317 2.581638 -1427.930238
1758493517789844444 0.231569 2.461035 -1360.495722
1758493517956444444 0.241472 2.405991 -1316.174140
1758493518123044444 0.238705 2.379632 -1263.913540
homography (2,0) homography (2,1) homography (2,2)
timestamp [ns]
1758493517123422222 0.000712 -0.000454 1.0
1758493517623233333 -0.000007 -0.000212 1.0
1758493517789844444 -0.000023 -0.000216 1.0
1758493517956444444 -0.000029 -0.000218 1.0
1758493518123044444 -0.000047 -0.000200 1.0
Step 4: Apply Transformation to Gaze Data#
Now apply the homography transformation to project gaze and fixations onto screen coordinates. This is done using the apply_homographies() method of gaze and fixation objects. Internally, PyNeon interpolates the homographies to the timestamps of the gaze and fixation samples and applies the closest valid transform.
You might notice warning messages. They are expected when homographies are missing for some frames (for example, markers were not visible or were blurred). If the nearest homography is too far from a sample time (default 500 ms), the sample is dropped. You can change this behavior with the max_gap_ms argument.
[9]:
gaze_on_surface = rec.gaze.apply_homographies(homographies)
fixations_on_surface = rec.fixations.apply_homographies(homographies)
C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\preprocess\preprocess.py:67: UserWarning: 134 out of 48219 requested timestamps are outside the data time range and will have empty data.
warn(
C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\preprocess\preprocess.py:110: UserWarning: 601 out of 48219 requested timestamps exceed max_gap_ms=500 relative to neighboring samples and will have empty data.
warn(
Applying homographies to gaze points: 100%|██████████| 47484/47484 [00:27<00:00, 1695.94it/s]
C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\preprocess\preprocess.py:67: UserWarning: 1 out of 476 requested timestamps are outside the data time range and will have empty data.
warn(
C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\preprocess\preprocess.py:110: UserWarning: 9 out of 476 requested timestamps exceed max_gap_ms=500 relative to neighboring samples and will have empty data.
warn(
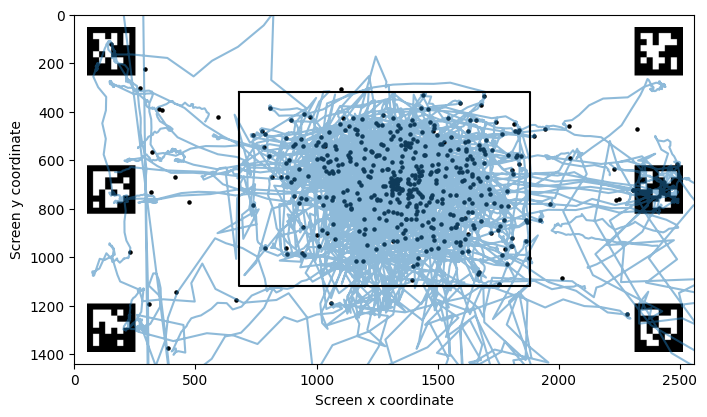
Now let’s plot all the mapped gaze and fixation data in the screen’s reference frame (origin at top-left, y increases downward):
[10]:
fig, ax = plt.subplots(figsize=(8, 6))
plot_marker_layout(marker_layout, ax=ax, show_marker_names=False, show=False)
ax.plot(
gaze_on_surface.data["gaze x [surface coord]"],
gaze_on_surface.data["gaze y [surface coord]"],
alpha=0.5,
)
ax.scatter(
fixations_on_surface.data["fixation x [surface coord]"],
fixations_on_surface.data["fixation y [surface coord]"],
s=5,
c="black",
)
# Plot where the artworks were
# There were 1200 x 800 pixels in size, centered on the screen (2560 x 1440)
ax.plot(
[680, 1880, 1880, 680, 680],
[320, 320, 1120, 1120, 320],
color="black",
label="Image outline",
)
ax.set_xlabel("Screen x coordinate")
ax.set_ylabel("Screen y coordinate")
ax.set_xlim(0, 2560)
ax.set_ylim(0, 1440)
ax.invert_yaxis()
plt.show()
Example 2: ArUco Markers#
The same workflow applies to ArUco markers. Instead of a family name, ArUco dictionaries are specified by their pattern (for example, '5x5_50'). The same four steps (detect, define coordinates, compute homography, transform) apply; only the marker family changes.
[11]:
rec = dataset.recordings[1]
video = rec.scene_video
detected_markers = video.detect_markers("5x5_50")
Detecting markers: 0%| | 0/1044 [00:00<?, ?it/s]C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\video\video.py:409: UserWarning: Failed to retrieve frame at index 0. Returning None.
warn(f"Failed to retrieve frame at index {frame_index}. Returning None.")
Detecting markers: 100%|██████████| 1044/1044 [00:08<00:00, 120.82it/s]
Using the shorter ArUco video, we will visualize detections across the full recording. Set show_video=False to avoid the interactive preview window and instead save the overlay to output_path.
[12]:
video.overlay_detections(
detected_markers, show_video=False, output_path="export/marker_detections.mp4"
)
Overlaying detections on video: 0%| | 0/1044 [00:00<?, ?it/s]C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\video\video.py:409: UserWarning: Failed to retrieve frame at index 0. Returning None.
warn(f"Failed to retrieve frame at index {frame_index}. Returning None.")
Overlaying detections on video: 100%|██████████| 1044/1044 [00:08<00:00, 126.95it/s]
Alternative: Contour-Based Screen-Corner Detection#
When fiducial markers are unavailable, estimate the homography from bright screen corners. The detect_contour() method looks for a bright rectangular contour per frame and returns its four corners. This works best when the screen is brighter than the background. You can tune brightness_threshold, adaptive, or morph_kernel, and use step or processing_window to speed up processing.
[13]:
import numpy as np
from pyneon.video import find_homographies
screen_detections = video.detect_contour()
contour_layout = np.array(
[
[0, 0],
[width, 0],
[width, height],
[0, height],
],
dtype=np.float32,
)
homographies_screen = find_homographies(
screen_detections,
layout=contour_layout,
)
Detecting contour corners: 0%| | 0/1044 [00:00<?, ?it/s]C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\video\video.py:409: UserWarning: Failed to retrieve frame at index 0. Returning None.
warn(f"Failed to retrieve frame at index {frame_index}. Returning None.")
Detecting contour corners: 100%|██████████| 1044/1044 [00:07<00:00, 135.31it/s]
Computing surface-mapping homographies: 100%|██████████| 870/870 [00:00<00:00, 2685.67it/s]
[14]:
video.plot_detections(screen_detections, 500)

[14]:
(<Figure size 640x480 with 1 Axes>, <Axes: >)
[15]:
video.overlay_detections(
screen_detections,
show_video=False,
show_ids=False,
output_path="export/contour_detections.mp4",
)
Overlaying detections on video: 0%| | 0/1044 [00:00<?, ?it/s]C:\Users\qian.chu\Documents\GitHub\PyNeon\pyneon\video\video.py:409: UserWarning: Failed to retrieve frame at index 0. Returning None.
warn(f"Failed to retrieve frame at index {frame_index}. Returning None.")
Overlaying detections on video: 100%|██████████| 1044/1044 [00:08<00:00, 117.43it/s]